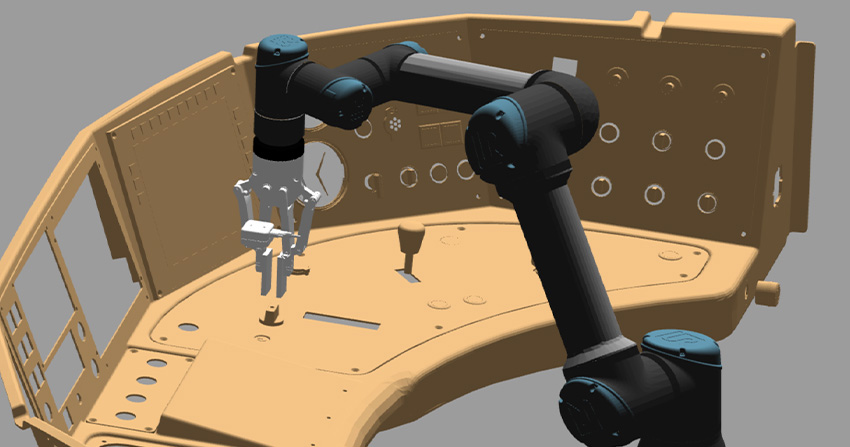
Dynamic control cabin testing.
DYCCAT addresses the challenge of automating dynamic testing on train cab control desks, removing the need for precise pre-positioning.
Through 3D vision and geometric registration algorithms, the system developed in DYCCAT recognises the geometry of the desk and accurately locates its controls, regardless of their initial position. This enables the robot to autonomously identify each element and intelligently manipulate the desk’s controls.
A key feature of DYCCAT is its flexibility: the solution is agnostic to the position and type of test desk, as long as its digital model is available. This allows for quick switching between different cabin models without manual reprogramming, significantly enhancing testing efficiency and repeatability.
DYCCAT demonstrates the potential of robotics and advanced vision technologies to automate functional testing in the railway sector, contributing to greater efficiency and traceability in cab validation processes.
DYCCAT is an initiative developed by Eurecat’s Robotics and Automation Unit in collaboration with Alstom, as part of a proof of concept aimed at technological validation for railway applications.

General data
Project
DYCCAT – Dynamic Control Cabin Testing
Project reference
2024-032420
Programme and call
Project funded with the support of ACCIÓ, the Agency for Business Competitiveness of the Generalitat de Catalunya, within the framework of Business Competitiveness Aid – Advanced Digital Technologies Coupons 2024.
Related SDGs
- 8 – Decent work and economic growth
- 9 – Industry, innovation and infrastructure
- 11 – Sustainable cities and communities
- 12 – Responsible Production and Consumption






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}