
Assaigs dinàmics de cabines de control.
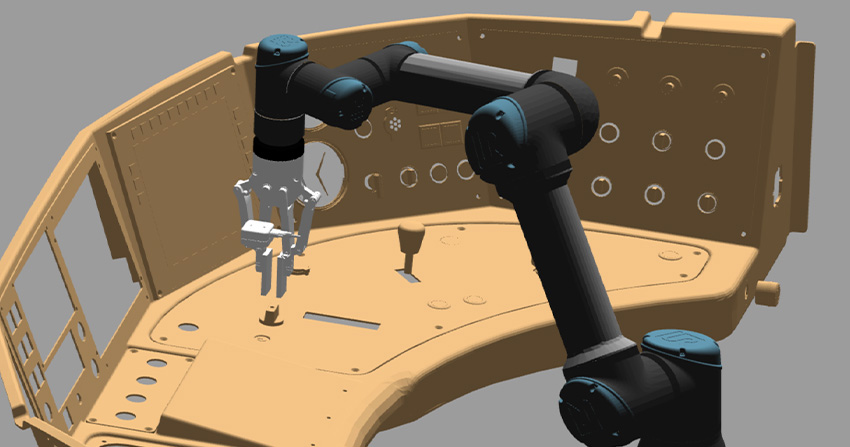
DYCCAT afronta el repte d’automatitzar els assaigs dinàmics sobre els pupitres de comandament a les cabines de tren, eliminant la necessitat d’un preposicionament exacte.
Mitjançant visió 3D i algoritmes de registre geomètric, el sistema desenvolupat a DYCCAT reconeix la geometria del pupitre i localitza amb precisió els seus controls, independentment de la seva posició inicial. D’aquesta manera, el robot pot identificar de manera autònoma cada element i manipular de manera intel·ligent els controls del pupitre.
Un aspecte destacat de DYCCAT és la seva flexibilitat: la solució és agnòstica a la posició i al tipus de pupitre d’assaig, sempre que se’n disposi del model digital. Això permet un canvi ràpid entre diferents models de cabina sense necessitat de reprogramació manual, optimitzant significativament l’eficiència i la repetibilitat de les proves.
DYCCAT mostra el potencial de la robòtica i de la visió avançada per automatitzar assaigs funcionals en el sector ferroviari, contribuint a millorar l’eficiència i la traçabilitat en la validació de cabines de control.
DYCCAT és una iniciativa desenvolupada per la Unitat de Robòtica i Automatització d’Eurecat en col·laboració amb Alstom, en el marc d’una prova de concepte orientada a la validació tecnològica per a aplicacions ferroviàries.

Dades generals
Projecte
DYCCAT – Assaigs dinàmics de cabines de control
Referència del projecte
2024-032420
Programa i convocatòria
Projecte finançat amb el suport d’ACCIÓ, l’Agència per a la Competitivitat de l’Empresa de la Generalitat de Catalunya, en el marc dels Ajuts a la Competitivitat Empresarial – Cupons de Tecnologies Digitals Avançades 2024
ODS relacionats
- ODS8 – Treball decent i creixement econòmic
- ODS9 – Indústria, innovació i infraestructura
- ODS11 – Ciutats i Comunitats Sostenibles
- ODS12 – Producció i Consum Responsables





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}