

SIMBIOTS project, which reached its end date, facilitates the introduction of robotics in new industrial processes and applications thanks to the development of collaborative robots that facilitates the interaction of robots and operators without physical barriers. SIMBIOTS allows: The implementation of safe workspaces shared between robots and operators The improvement in the ergonomics of workers The reduction of the number of injuries and casualties resulting from the activity The increase in industrial productivity through sustainable manufacturing SIMBIOTS is a project of the Community Industries of the Future (IdF) of RIS3CAT coordinated by the Institute of Robotics and Industrial Informatics (IRI) with [...]

IdF Community
EurecatMV2025-12-19T10:16:02+01:00The Community of Industries of the Future, coordinated by Eurecat and composed of 28 reference entities in the Catalan manufacturing sector, aims to consolidate a leading innovation pole in Efficient and Sustainable Manufacturing in Catalonia, by creating a network of capacities and local pilot plants that allow the cohesion of integral value chains around industrial R+D+i. The IdF community jointly proposes the realization of 5 strategic projects of applied research and industrial development during the 2018-2020 triennium, focused on the fields of industrial digitization, collaborative robots, advanced processes and functional products. These include the IGNITE project, [...]

ACTIV4.0
EurecatMV2019-09-12T11:31:16+02:00The ACTIV4.0 project researches and develops technologies for the digital management of utilities assets, processes and installations (service provider networks) to offer a better service to the user. The digitalization, sensorization and monitoring of assets and processes associated with utilities enable the optimization of the operation of plants and networks in terms of efficiency and cost, as well as the improvement of maintenance processes in order to minimize incidents and investment and asset renewal costs. The results are validated through pilot case studies for application in utilities environments, including water treatment plants, waste treatment plants, power [...]

VIZTA
EurecatMV2023-04-13T09:02:22+02:00Innovative technologies in the field of optical sensors and short, medium and long-range 3D devices to demonstrate their value in several key applications in the automotive, security, smart buildings, mobile robotics for smart cities and Industry 4.0 sectors. VIZTA project also focuses on multimodal 2D/3D imaging, proposing a monolithic integration that enables smaller, cheaper and more efficient systems. The innovation of VIZTA significantly improves the multimodal 2D/3D imaging current systems which use two separate sensors to capture the depth and the colour image. Aerial vehicles are becoming a relevant tool for the inspection of many infrastructures due [...]

MAF
EurecatMV2021-03-30T06:36:24+02:00Automated processes for aircraft quality validation through the use of robotics and artificial vision. The solution being developed by MAF explores new possibilities to realize the validation tests in a more quickly and efficiently way. With this, the use of robotics and computer vision is maximized in order to minimize human interaction and automate the validation processes practically to the totality. Currently, the aircrafts validation tests imply a long and exhaustive process which consumes a huge quantity of time to verify all security and quality regulations. The human-work limits the efficiency of this process, increase the [...]

DIH-HERO
EurecatMV2019-08-01T06:35:15+02:00European innovation digital hub, formed by centres of reference in robotics applied to the health sector to promote and accelerate the implementation of technological innovations in medical assistance. DIH-HERO project develops medical applications in the fields of diagnosis, treatment, assistance and prevention, and other services related with training, maintenance, legal and business advice or logistics, to share knowledge and analyse the needs of the health sector, demonstrating the feasibility of the application of robotics in real environments to solve medical assistance needs. The project counts with the participation of 16 European hubs, led by centres of [...]

ECOFIBRA
EurecatEQZ2025-12-17T15:19:25+01:00ECOFIBRA is designing and testing a composite material with advanced mechanical properties made in an additised thermoplastic mould from recovered cellulose fibre. The project will also examine options regarding the application of cellulose fibre to new products and new circular economy business models and will optimise recyclable paper’s journey from the disposal point to the management centre through the design of a stackable container made from the generated composite material. ECOFIBRA will also develop a raw material quality measurement system to improve the quality of the final material. The results of the project will be applied [...]

SHAREWORK
EurecatEQZ2020-09-07T11:37:39+02:00Sharework develops a human robot collaboration. It develops a system capable of understanding the environment and predict human actions by using artificial intelligence and process data in an environment where human safety is guaranteed. This way, the effective adoption of Human-Robot Collaboration on current automation lack manufacturing processes is possible. The solution is based on a set of software modules to process and interpret the process and environmental data and adjusts collaborative robotics to each industrial process and to the workers themselves, making possible to adapt the robots currently installed in each plant to ensure more [...]

PRO2
EurecatEQZ2020-08-04T13:12:52+02:00The PRO2 project investigates and develops new technologies and materials in the fields of additive manufacturing and 3D printing for the development of new products and applications. The project includes the study and development of new design techniques and tools for predicting the mechanical behavior of parts manufactured with these technologies. On the other hand, PRO2 develops new materials with high thermal and mechanical resistance, new manufacturing processes and the development of new post-processing tools to improve the surface finish of the parts manufactured in 3D. The PRO2 project represents a strategic opportunity for the development [...]

MOOD2Be
eurecatMP2019-11-15T08:21:05+01:00The aim of the MOOD2Be project is to address a very specific problem in the domain Component Based Software Development (CBSD) in Robotics: the correct design and implementation of the robot Behavior, also known as “Task Planning” or “Components Orchestration”. The project focuses specifically on the Coordination and the role of the Behavior Developer, including the definition of a comprehensive meta-model, compliant with the RobMoSys project one, and the implementation of specific set of tools and run-times which streamline the adoption of this models in real-world applications. MOOD2Be is a project of the team of the [...]

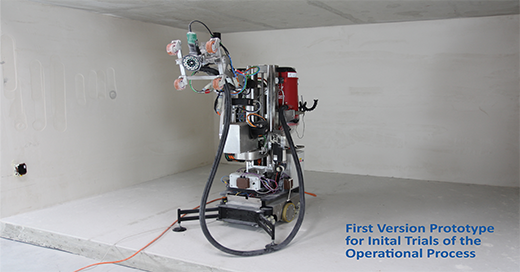
BOTS2REC
eurecatMP2019-11-15T11:51:50+01:00Bots2Rec project aims to introduce autonomous robots in real world scenarios for the removal of the asbestos contamination and minimize the workers exposure. The solution developed by the project consists of multiple robotic arms equipped with abrasive and aspiration tools that eliminate the asbestos autonomously. Bots2Rec also counts with a control system that allows easy task programming, the supervision of the automated process by humans and optional remote control. With Bots2Rec solution workers exposure to contaminated material is reduced to a minimum while enhancing productivity and cutting costs in protective clothing needed to perform asbestos cleaning [...]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
GRAPE
eurecatMP2020-12-14T12:32:52+01:00Development of a pheromone dispenser for matting disruption in vineyards using an autonomous ground robot equipped with a robotic arm. GRAPE (GroundRobot for vineyArd Monitoring and ProtEction) is an Echord++ experiment on Agricultural and Food Robotics. The project is developing the on-board intelligence, ranging from autonomous navigation algorithms to perception and manipulation. The system is able to navigate autonomously over different type of terrain in vineyards. The localization is based on the hybridization of GNSS (Global Navigation Satellite Positioning) and local sensors. The robot is equipped with laser scanners that are concatenated across time and space [...]

LOGIMATIC
eurecatMP2023-01-24T10:05:04+01:00Logimatic developed a SLAM-based accurate localization and navigation system to automate the port logistics vehicles in order to increase the safety of workers, reduce the margin of error and improve the productivity and operational efficiency of loading and unloading tasks; featuring: Straddle Carrier retrofitting and automation. Autonomous navigation in free space with: obstacle avoidance, replanning, safety stop. Specialized planners: along container navigation. SLAM module (GNSS+lidar+odometry) with container model matcher. Integration with GIS-based Central Management System (CMS) interfaced to Terminal Operating System (TOS). The Logimatic system is protected against cyberattacks and combines a multi-constellation GNSS receiver with onboard [...]

NATURE4CITIES
EurecatEG2019-12-17T11:52:56+01:00NATURE4CITIES is a research and innovation project. Its goal is to create a Reference Platform for Nature Based Solutions (NBS). The platform offers technical solutions, methods and tools aimed at facilitating decision-making in urban planning. This will address the environmental, social and economic challenges of cities. Nature4Cities aims to bring nature back into innovation, planning and their implementation. This new approach implies new collaborative models driven by citizens, researchers, policy makers, and industry leaders, using co-creation processes and sharing best practices. In Nature4Cities, Eurecat contributes with its experience in data acquisition and processing with drones. Aerial imagery [...]

{kind=link}
Built2Spec
EurecatEG2019-11-12T15:46:47+01:00To reduce the energy efficiency differences between the envisaged design specs and the ultimate performance of a building—i.e., the energy gap—is the main goal of Built2Spec. It offers a new set of technological advances for the inspection of construction sites. They are helpful to achieve the European requirements of energy efficiency and more sustainable construction at a much lower cost. The objective of Built2Spec is the reduction of the energy efficiency differences between the envisaged design specs and the ultimate performance of a building. To achieve this ambitious objective, Built2Spec offers a new set of technological advances [...]